
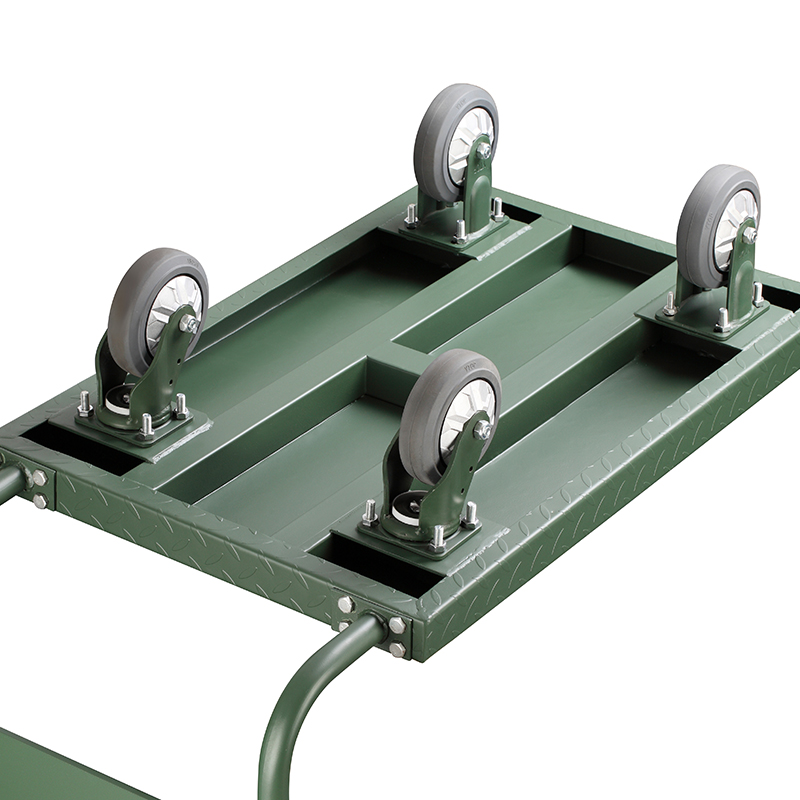
Itilizasyon souvan nan manyen handcart pral jwenn ke chart aktyèl la pral gen tankou yon sitiyasyon konsepsyon, devan an se de wou direksyon, dèyè a se de wou inivèsèl.Poukisa nou pa sèvi ak kat wou inivèsèl oswa kat direksyon?

Premye a tout ak kat wou direksyon sètènman pa, san asistans nan wou inivèsèl la, wou direksyon ka sèlman avanse pou pi devan nan yon direksyon, sof si ou pote sèlman nan yon liy dwat, oswa lòt moun li se pi bon yo dwe onèt ak wou inivèsèl la?Lè sa a, poukisa pa sèvi ak kat?Gen sitou konsiderasyon sa yo:
1, pri-efikas: de chariot wou inivèsèl konpare ak kat chariot wou inivèsèl nan pri fabrikasyon an se pi plis abòdab.Kat chariot wou inivèsèl mande pou plis pati ak estrikti mekanik konplèks, ogmante depans fabrikasyon ak depans antretyen.Pandan ke konsepsyon senp de chariot wou inivèsèl diminye kantite pati ak konpleksite, kidonk plis pri-la efikas.
2, itilizasyon espas: de chariot wou inivèsèl konpare ak kat chariot wou inivèsèl nan itilize nan espas pi fleksib.De wou siplemantè nan yon kabwa kat gimbal mande pou yon pi gwo reyon vire ak espas, ki ka pa apwopriye pou anviwònman sere oswa koridò ki gen anpil moun.De charyo wou gimbaled, nan lòt men an, ka pi fasil manevwe nan espas ki sere epi bay pi bon manyabilite.
3, manyablite ak estabilite: de chariot wou inivèsèl tou gen avantaj an tèm de manyablite ak estabilite.Avèk sèlman de woulèt, li pi fasil kontwole direksyon an ak vire nan pousèt la.De wou siplemantè sou yon kabwa kat gimbal ka lakòz enstabilite lè w ap vire, espesyalman nan gwo vitès oswa sou tè inegal.De charyo wou gimbaled yo relativman pi estab, ede kenbe kago balanse ak transpòte san danje.
Lè poste: Mar-04-2024